A day before Christmas, I was greeted by a yellow DHL packet from Hong Kong. The panels had finally arrived after 8 days – I had chosen rush (48hrs turnaround) and express shipping, and it did work out well as I received them before Christmas. The boards turned out to be nice. Not dirty at all and at a price which was reasonable to me.
Assembly

I reflowed the board with a hot air gun. Applied solder paste with a toothpick and placed the parts with the naked eye using a pair of good quality tweezers. The passives are all 0603 size (1.5mm x 0.76mm). Since I was yet to receive the batch of BSS138 FETs I ordered, I used a BC847 NPN transistor for the build instead. Reflowing left a couple of solder bridges on the 74LVCH16T245 (now onwards referred to as ‘the 245’) buffer chip (smallest pitched part on board – 0.5mm) which I removed using a solder wick. Then soldered the pin headers manually.
Cleaned up after soldering using nail polish remover. It’s terribly inefficient, and I plan to get a bottle of concentrated isopropyl alcohol (IPA) at some point of time. Here’s the finished result:


“Smoke Test”
A colloquial reference to the first power-on of the assembled circuit. I plugged the cape into the BeagleBone Black and powered on the assembly. The LEDs lit up and the board booted. No smoke or burning smell. Woohoo, test passed, or …
Errata
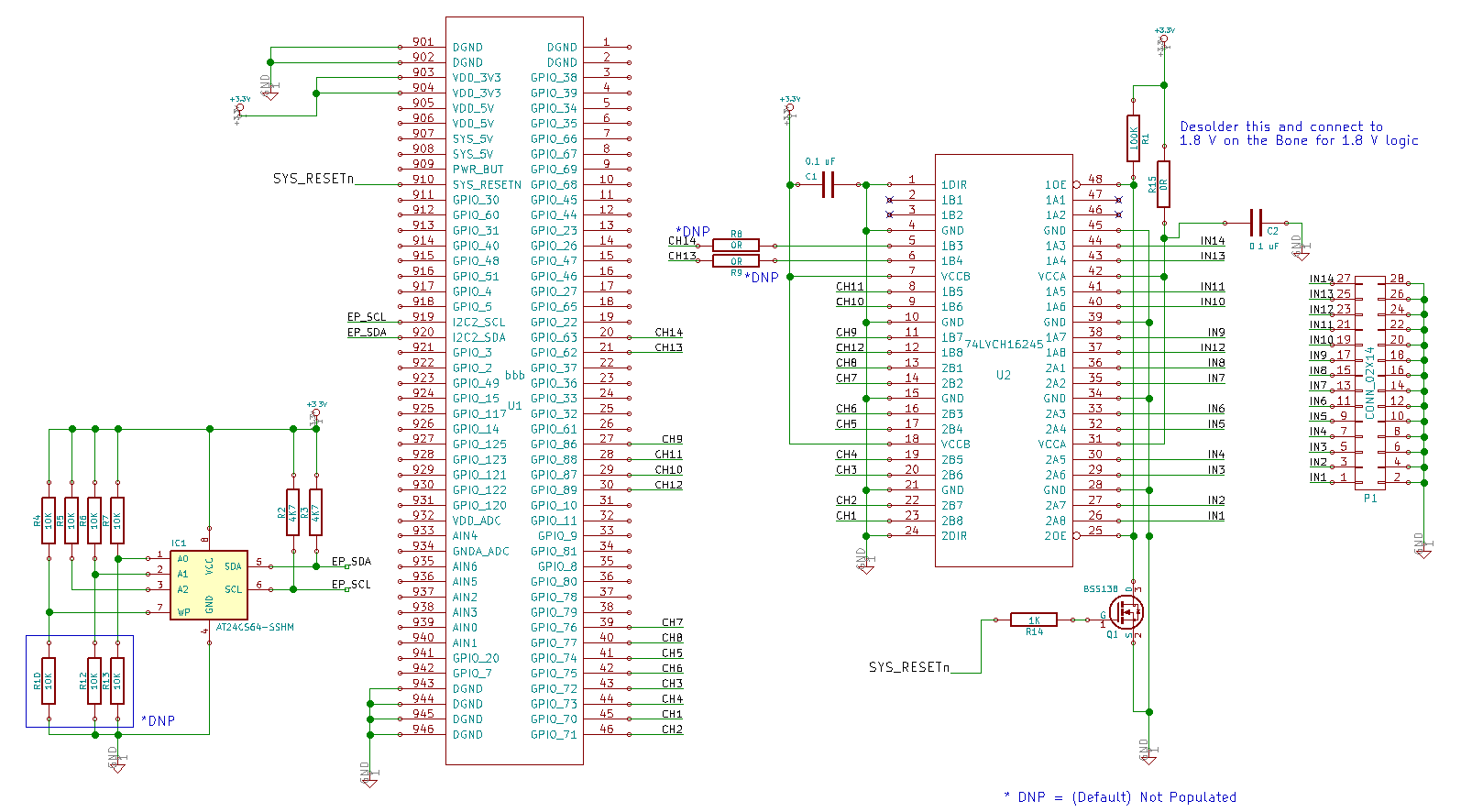
I then probed the BeagleBone P8 header pins which serve as inputs to BeagleLogic using an LED, and did the same with the input pin headers. The LED were brighter on the inputs to the ‘245 than the P8 pins, which was contrary to expectations. A quick check on the schematics and turns out that I wired the 245 to translate from rail B to rail A while connecting the inputs to rail A and the Bone pins to rail B. Whoops! However I quickly resolved the problem by lifting pads 1 and 24 (DIR1 and DIR2) off the PCB (which was simple as those were on the ends) and soldered a bit of magnet wire through and to one of the pads of C1 going to +3.3V. Neatly done, and a lesson not to design and send off PCBs to a fab while pulling an all-nighter 😛 .
Testing
Once this was done all was back on track and the circuit worked as expected. The cape as designed did not interfere with the boot-up process due to the action of the transistor pull-down that ensured that the buffer did not drive the P8 pins until SYS_RESETn signal was high.
I tested it with SPI signals upto 24 MHz using the BeagleBoard itself and results are good at a 100Msps sample rate. I could also subject the input pins to 5V freely, without fear that I would burn the board. That’s exactly what the cape is meant for, and I’m happy with the results.
I am planning to give away the surplus boards from the first batch so anyone interested in testing it out can get in touch and depending upon where you are, I may be able to send you one of the surplus unpopulated boards (no parts included) which can be assembled yourself (1 IC, 4 passives, 1 transistor and pin headers). The Cape EEPROM section can be left unpopulated without affecting the functionality.
The design files are now available here. I made some changes to the design after fixing the errata, so the cape version is bumped to 1.1 .
Suggestions and feedback on the cape are welcome. The design is Open Hardware, so you have the freedom to use it and improve it as you like. Let me know if there’s anything that could be added in the cape as there is plenty of board real estate.